Arduino
百度
密码学
集合操作符
ratio-test
题解
YoloV5
费用最优
概率论
论文选题
全文检索
山区监视场景建模
字符串替换
动态背景
CountDownLatch
网站安全防护
PM项目管理
go
iwebsec
clipStudioPaint
ICP
2024/4/12 11:50:42
PCL - ICP代碼研讀(八 ) - transformCloud函數
PCL - ICP代碼研讀(八 ) - transformCloud函數前言transformCloud前言
如PCL - ICP代碼研讀(六 ) - IterativeClosestPoint架構中所介紹的,transformCloud函數用於對輸入點雲的XYZ坐標及法向量做剛體變換。
本篇中介…
PCL - ICP代碼研讀(十九 ) - CorrespondenceRejectorDistance實現
PCL - ICP代碼研讀(十九 ) - CorrespondenceRejectorDistance實現前言getRemainingCorrespondences函數前言
getRemainingCorrespondences函數是CorrespondenceRejector類別的核心,由CorrespondenceRejector的子類別各自實作。
它接受origi…
PCL - ICP代碼研讀(二三 ) - ConvergenceCriteria架構
PCL - ICP代碼研讀(二三 ) - ConvergenceCriteria架構前言ConvergenceCriteriausingconstructor和destructor收斂判斷函數前言
ConvergenceCriteria是一個抽象類別,提供了hasConverged介面,用於判斷當前點雲校正算法是否收斂。
…
PCL - ICP代碼研讀(一) - 整體架構
PCL - ICP代碼研讀(一) - 整體架構如ICP(Iterative Closest Point)算法推導中描述的ICP算法,可以分為以下三步:
尋找兩點雲間的配對估計轉換矩陣判斷收斂與否
在PCL這個庫中,整個校正過程所涉…
PCL - ICP代碼研讀(十八 ) - DataContainerInterface和DataContainer
PCL - ICP代碼研讀(十八 ) - DataContainerInterface和DataContainer前言DataContainerInterfaceusingdestructor計算配對分數的介面DataContainerusingconstructor和destructor點雲的setter和gettertarget點雲搜索方法setter法向量setter和getter配對分…
PCL - ICP代碼研讀(十一 ) - Correspondence實現
PCL - ICP代碼研讀(十一 ) - Correspondence實現前言getRejectedQueryIndices<< 運算子前言
接續PCL - ICP代碼研讀(十 ) - Correspondence架構,本篇繼續來看Correspondence各函數的實現,本片對應到…
PCL - ICP代碼研讀(四 ) - getFitnessScore函數
PCL - ICP代碼研讀(四 ) - getFitnessScore函數前言getFitnessScore - for two vectorsgetFitnessScore - for two point clouds前言
接續PCL - ICP代碼研讀(三 ) - Registration初始化,本篇主要介紹Registration類別…
PCL - ICP代碼研讀(五 ) - align函數
PCL - ICP代碼研讀(五 ) - align函數前言alignalign wrapper前言
接續PCL - ICP代碼研讀(二 ) - Registration架構,本篇主要介紹Registration類別的align函數。
computeTransformation這個純虛擬函數用於估計兩點雲間…
PCL - ICP代碼研讀(二四 ) - DefaultConvergenceCriteria架構
PCL - ICP代碼研讀(二四 ) - DefaultConvergenceCriteria架構前言DefaultConvergenceCriteriausing收斂狀態constructor和destructorgetter和settercalculateMSEprotected成員變數前言
DefaultConvergenceCriteria顧名思義,也就是預設的收斂…
PCL - ICP代碼研讀(二二 ) - TransformationEstimationSVD實現
PCL - ICP代碼研讀(二二 ) - TransformationEstimationSVD實現
前言
TransformationEstimationSVD類別中有五個estimateRigidTransformation函數,其中四個是public的,另一個是protected的。前四個public的estimateRigidTransfor…
PCL - ICP代碼研讀(六 ) - IterativeClosestPoint架構
PCL - ICP代碼研讀(六 ) - IterativeClosestPoint架構前言usingpublic成員函數constructor和destructorcopy constructordestructorgetConvergeCriteriasetInputSourcesetInputTargetuse_reciprocal_correspondence_的setter和getterprotected成員函數pr…
PCL - ICP代碼研讀(三 ) - Registration初始化
PCL - ICP代碼研讀(三 ) - Registration初始化前言setInputSourcesetInputTargetinitComputeinitComputeReciprocal前言
接續PCL - ICP代碼研讀(二 ) - Registration架構,這邊繼續來看Registration成員函數的實現。本…
PCL - ICP代碼研讀(十三 ) - CorrespondenceEstimationBase實現
PCL - ICP代碼研讀(十三 ) - CorrespondenceEstimationBase實現前言CorrespondenceEstimationBasesetInputTarget函數initCompute函數initComputeReciprocal函數前言
從PCL - ICP代碼研讀(十二 ) - CorrespondenceEstimationBase…
PCL - ICP代碼研讀(二六) - TransformationEstimationPointToPlaneLLS架構
PCL - ICP代碼研讀(二六) - TransformationEstimationPointToPlaneLLS架構前言TransformationEstimationPointToPlaneLLSusingconstructor和destructor估計剛體變換的函數constructTransformationMatrix前言
ICP的變種Point-To-Plane相較於經典款的ICP&…
PCL - ICP代碼研讀(十五 ) - CorrespondenceEstimation實現
PCL - ICP代碼研讀(十五 ) - CorrespondenceEstimation實現前言CorrespondenceEstimationdetermineCorrespondences函數determineReciprocalCorrespondences函數前言
接續PCL - ICP代碼研讀(十四 ) - CorrespondenceEstimation架…
PCL - ICP代碼研讀(七 ) - determineRequiredBlobData函數
PCL - ICP代碼研讀(七 ) - determineRequiredBlobData函數前言determineRequiredBlobData前言
在computeTransformation函數中有這麼一段代碼: // Make blobs if necessary// ?determineRequiredBlobData();PCLPointCloud2::Ptr target_blo…
PCL - ICP代碼研讀(十 ) - Correspondence架構
PCL - ICP代碼研讀(十 ) - Correspondence架構前言Correspondence前言
Correspondence結構體表示兩點雲間的一組配對,它的架構主要寫在correspondence.h中。
Correspondence
必要的include:
#pragma once#ifdef __GNUC__
#pra…
PCL - ICP代碼研讀(二五 ) - DefaultConvergenceCriteria實現
PCL - ICP代碼研讀(二五 ) - DefaultConvergenceCriteria實現前言DefaultConvergenceCriteria前言
接續PCL - ICP代碼研讀(二四 ) - DefaultConvergenceCriteria架構,本篇繼續介紹DefaultConvergenceCriteria中hasCon…
PCL - ICP代碼研讀(九 ) - computeTransform函數
PCL - ICP代碼研讀(九 ) - computeTransform函數前言computeTransform前言
computeTransform函數實現了ICP算法,是icp.hpp的精髓所在。
回顧ICP(Iterative Closest Point)算法推導中提到的ICP算法三步驟,…
PCL - ICP代碼研讀(十四 ) - CorrespondenceEstimation架構
PCL - ICP代碼研讀(十四 ) - CorrespondenceEstimation架構前言CorrespondenceEstimationusingconstructor和destructordetermineCorrespondences和determineReciprocalCorrespondences函數clone函數前言
CorrespondenceEstimation類別繼承自抽象類別Co…
PCL - ICP代碼研讀(十六 ) - CorrespondenceRejector架構
PCL - ICP代碼研讀(十六 ) - CorrespondenceRejector架構前言CorrespondenceRejectorusingconstructor和destructor輸入點對的setter和getter配對拒絕相關函數getClassName點雲,法向量設定相關函數protected成員前言
CorrespondenceRejector…
PCL - ICP代碼研讀(二十 ) - TransformationEstimation剛體變換估計
PCL - ICP代碼研讀(二十 ) - TransformationEstimation剛體變換估計前言TransformationEstimationusingconstructor和destructor估計剛體變換的函數前言
TransformationEstimation是一個抽象類別,提供了多個用於估計剛體變換的介面。
本篇對…
PCL - ICP代碼研讀(二七) - TransformationEstimationPointToPlaneLLS實現
PCL - ICP代碼研讀(二七) - TransformationEstimationPointToPlaneLLS實現前言TransformationEstimationPointToPlaneLLSestimateRigidTransformation的wrapperconstructTransformationMatrixestimateRigidTransformation前言
TransformationEstimation…

视觉里程计4(SLAM十四讲ch7)-ICP
ICP 3D3D SVD方法
非线性方法 实践
使用两幅图的RGB-D图像,通过特征匹配获取两组3D点,最后利用ICP计算他们的位姿变换。 pose_estimation_3d3d
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/f…
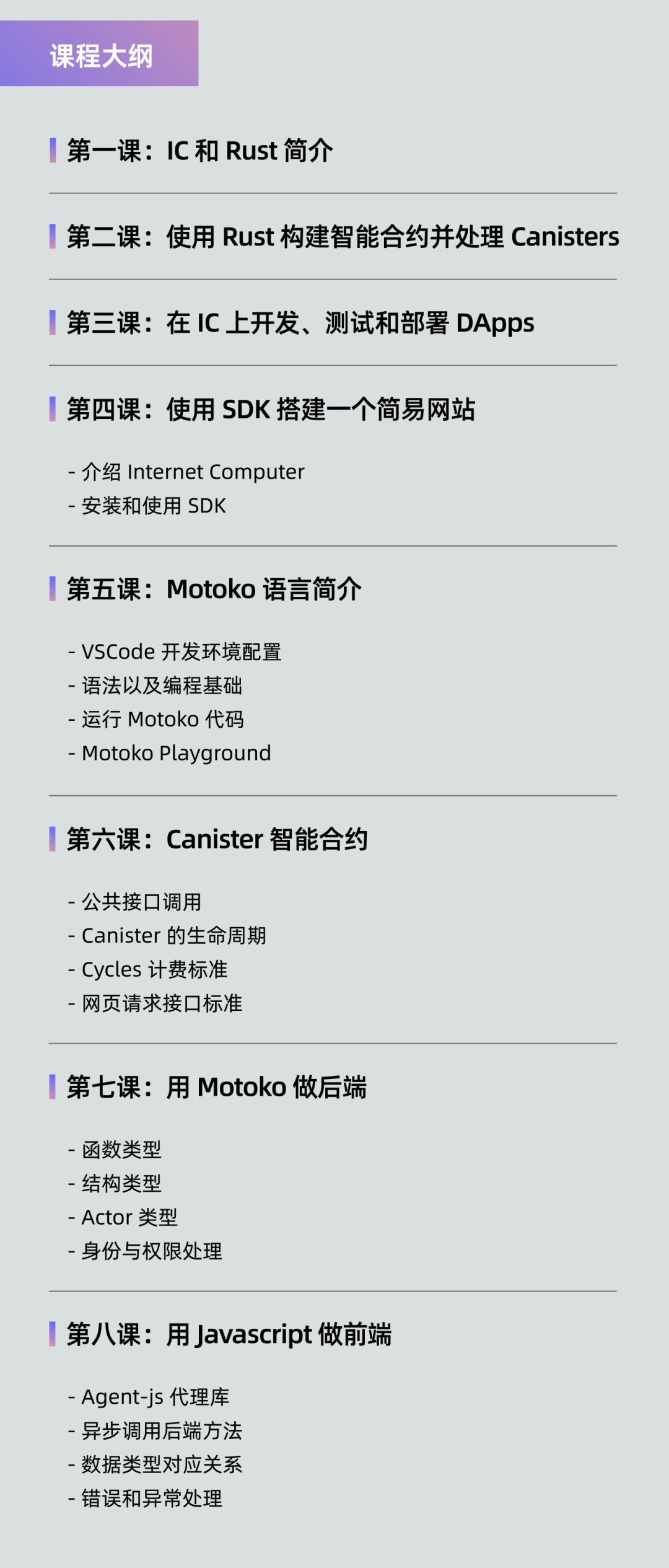
限时免费入学!「区块链快速入门到开发实战」带你轻松迈向 IC 生态
Web3 行业环境变化万千,如何才能开发安全、性能、效率优势并存的创新项目呢?
找对开发方向和项目思路前,选择一个极具性价比的生态尤为关键。自 2021 年 5 月 DFINITY 开发的互联网计算机(Internet Computer)主网上线…

open3d ICP 配准
文章目录 Three common registration techniquesPoint-to-point techniquePoint-to-plane registration ICP registrationHelper visualization functionInputGlobal registrationExtract geometric featureInputRANSAC Point-to-point ICPPoint-to-plane ICP References Three…
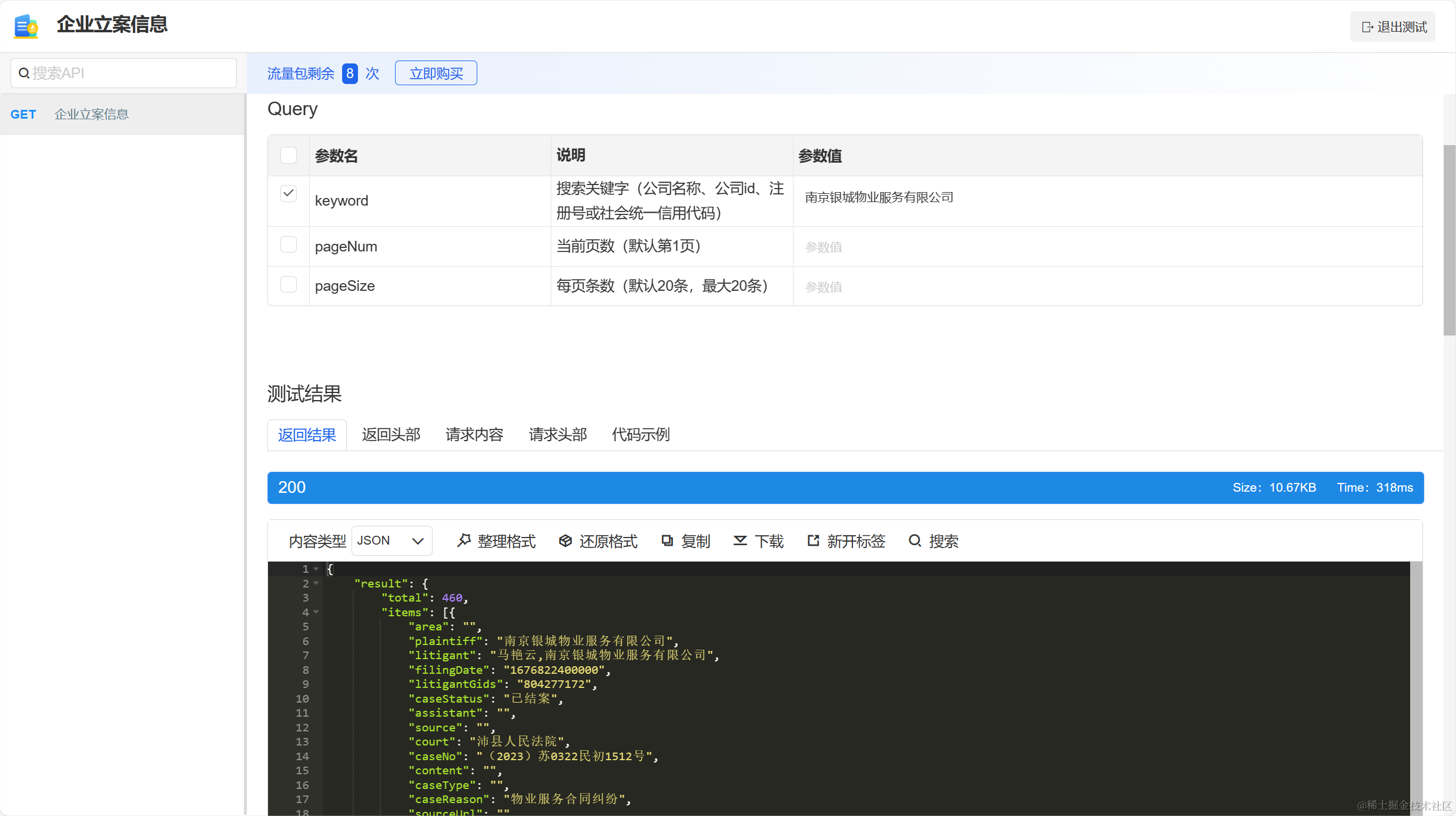
数据智能化管理:企业网站备案信息API的应用案例
引言
在数字化时代,企业备案信息管理变得愈发重要。无论是为了合规性还是提高业务运营效率,企业都需要有效管理其网站备案信息。幸运的是,现代技术为企业提供了强大的工具,如企业网站备案信息API,可帮助他们更智能地管…
PCL - ICP代碼研讀(十二 ) - CorrespondenceEstimationBase架構
PCL - ICP代碼研讀(十二 ) - CorrespondenceEstimationBase架構前言CorrespondenceEstimationBaseusingconstructor和destructor點雲的setter和getter法向量相關函數索引的setter和getter最近鄰查找相關函數估計點對的函數point_representation_的setter…
PCL - ICP代碼研讀(十七 ) - CorrespondenceRejectorDistance架構
PCL - ICP代碼研讀(十七 ) - CorrespondenceRejectorDistance架構前言CorrespondenceRejectorDistanceusingconstructor和destructorgetRemainingCorrespondences最大距離的getter和setter點雲,法向量設定相關函數target點雲搜索方法setterap…
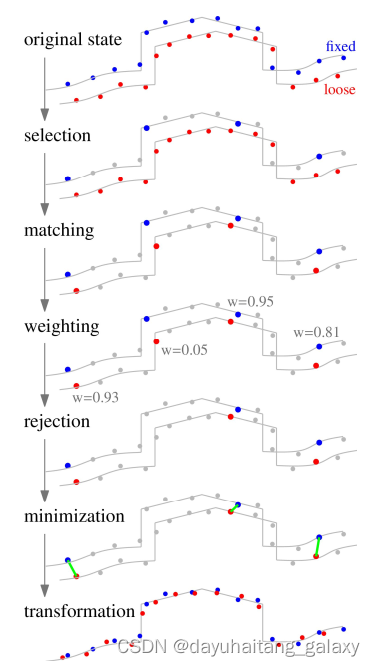
Open3D 点云与模型ICP配准(Python,详细步骤版本二)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这是一个很有趣的功能,在真正进入主题之前,让我们先回顾一下点云与点云ICP算法的过程,如下图所示: (1)挑选发生重叠的点云子集,这一步如果原始点云数据量比较巨大,一般会对原始点云进行下采样操作。 (2)匹…

点云配准(二)— python open3d ICP方法
上一节中介绍了点云配准的基础知识。本节将采用python open3d来进行点云配准。 open3d安装和点云配准介绍,请参考:
Open3d读写ply点云文件_Coding的叶子的博客-CSDN博客1 Open3d 安装Open3d是由Intel发布的一个开源库,支持快速开发和处理3D数…
PCL - ICP代碼研讀(二 ) - Registration架構
PCL - ICP代碼研讀(二 ) - Registration架構前言usingpublic函數constructor和destructorsetter和getterregisterVisualizationCallbackgetFitnessScorehasConvergedaligngetClassNameinitCompute和initComputeReciprocalCorrespondenceRejector相關函數…
PCL - ICP代碼研讀(二一 ) - TransformationEstimationSVD架構
PCL - ICP代碼研讀(二一 ) - TransformationEstimationSVD架構前言TransformationEstimationSVDusingconstructor和destructor估計剛體變換的函數getTransformationFromCorrelationprotected成員變數前言
TransformationEstimationSVD是TransformationE…
【小贪】Python实现传统2D/3D配准——SIFT/SURF/ BRISK/ORB/AKAZE/ICP
导入使用到的包
import random
import math
import matplotlib.pyplot as plt
import numpy as np
import open3d as o3d
import cv2基于传统特征点匹配的2D配准函数。函数输入为想要配准的source图和target图,两个图像均为维度(h, w, 3)的ndarray。函数可以选择使…
基于2D激光雷达匹配的充电桩位姿检测
原理
1. 激光雷达滤波,滤除太远的雷达数据,并降采样
2. 对雷达数据进行分割聚类出candidates
3. 通过策略,过滤掉大部分不符合的candidates
4. 对candidates与充电桩模板数据进行PCA、ICP匹配
5. 选择距离最小或者得分最高的一帧作为输出…

点云配准论文阅读笔记--(4PCS)4-Points Congruent Sets for Robust Pairwise Surface Registration
目录点云配准系列写在前面Abstract摘要1 Introduction引言2 Background研究背景RANSACRandomized Alignment3 Approximate Congruent 4-Points近似共面四点3.1overview 概述3.2 Affine Invariants of 4-Points Sets四点集的仿射不变3.3 Extracting Congruent 4-points in 3D三维…

ICP Hacker House 邀你共赴 IC 生态项目开发新风口
为了更好地探索区块链技术前沿,体验作为全面智能合约云平台的互联网计算机(Internet Computer Protocol),将数据、内容、计算和用户体验全部托管于链上,IC 生态致力于推动去中心化互联网的深度发展,并将更安…

重塑计算:ICP 打造无限智能合约云解决方案
作者:Lynn Cadet
编译:TinTinLand
原文:https://www.hostingadvice.com/blog/internet-computer-offers-a-limitless-smart-contract-cloud-solution/ 摘要:与其前身互联网一样,区块链行业寻求引领一个新时代及其经济…
点云配准(一)— ICP方法
点云配准本质上是将点云从一个坐标系变换到另一个坐标系。 点云配准通常会需要用到两个点云数据。第一类点云数据称为原始点云,用S(source)来表示。第二类点云数据称为目标点云,用T(Target)来表示。 点云配…